09 Cameras, Lenses and Light Fields
09 Cameras, Lenses and Light Fields
成像方法
计算机图形学有两种成像方法,包括合成和捕捉
- 合成:光栅化和光线追踪
- 捕捉:使用相机等设备记录真实世界图像
相机原理
小孔成像
通过小孔形成倒立实像,所有点清晰无虚化。
使用小孔成像原理的相机称作针孔相机,除此之外,还存在使用透镜的相机。
针孔相机拍出来的东西没有深度可言,不存在虚化的部分,背景都是清晰的
相机结构
相机由镜头和传感器组成。
- 镜头:由多个透镜组成,负责光线聚焦。
- 传感器:记录光线强度,现代相机中通常为数字传感器。
为什么传感器必须要镜头?
- 实际上,记录光线的传感器并不能区分光的方向,它接受的是irradiance,而不是radiance
- 因此,必须要使用镜头来隔绝其他无关的光线
视场
视场角(Field of View, FOV) :由传感器大小和焦距决定,影响拍摄范围。
一般来说,FOV有水平FOV和垂直FOV两种
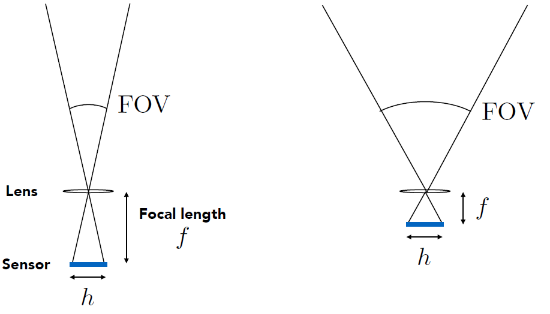
定义传感器的大小为h;而传感器到镜头的距离为f,f也被称为焦距
于是,我们可以得到FOV的计算公式
$FOV = 2arctan(h/{2f})$
等效焦距:基于35mm胶片标准定义的焦距,便于不同相机参数比较。
- 17mm对应的FOV为104
- 50mm对应的FOV为47
- 200mm对应的FOV为12
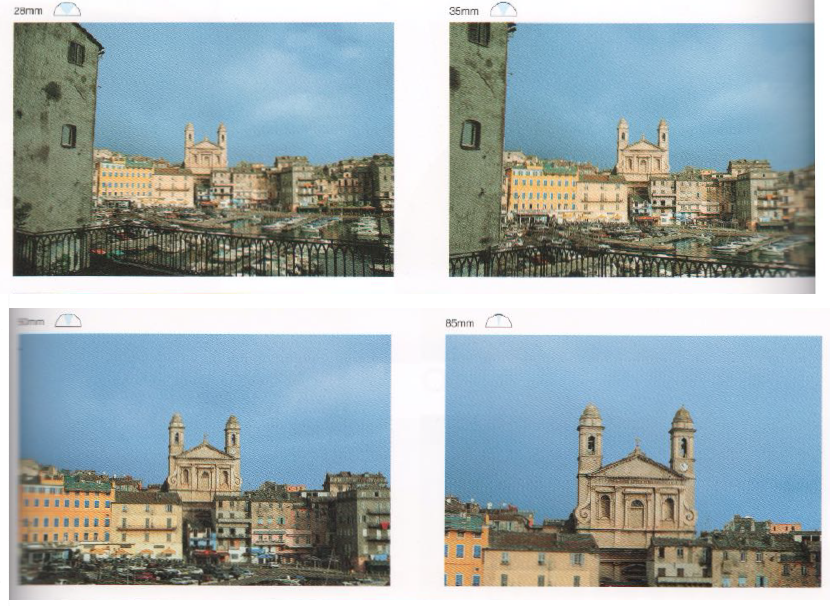
上图是使用不同焦距的相机于同一位置拍摄的,
曝光度
曝光
H = t × E
其中 H 为曝光度,t 为曝光时间,E 为Irradiance。
在相机中,曝光度由光圈、快门速度和ISO共同决定。
- 光圈(Aperture) :控制进入相机的光量,由F数表示,F数越大光圈越小。
- 快门速度(Shutter Speed) :控制光线进入时间,影响运动模糊。
- 感光度(ISO gain) :可以认为是后处理。但是这个后处理可以发生在硬件上,例如传感器本身可以调节对光的敏感度,或者从数字信号上调整。
光圈,快门速度,感光度的影响分别如下图所示
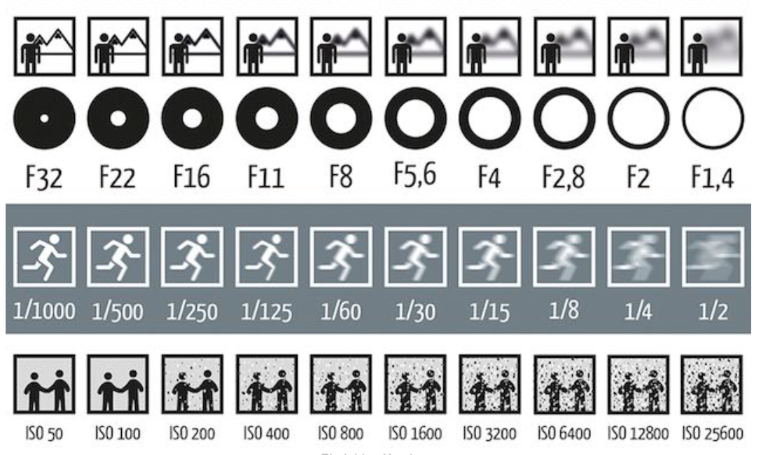
可以看到,高ISO虽然可以提升曝光度,但会导致图像噪点增加
F数:焦距除以光圈的直径
运动模糊的产生:对于机械的快门来说,它在打开和关闭会持续一段时间,而在运动的物体在这段时间会移动,中间的过程也会被记录下来,传感器平均之后会产生模糊
采取更短的曝光时间,那么可以一定程度上减轻运动模糊,但是相应的曝光度也会降低,为了平衡,可以调节光圈或者ISO
如下显示了F数和快门时间的对应

每一列设置的曝光度都大致相同,但是得到的结果并不完全一样
- 大光圈会引起景深的问题
- 快门时间会影响运动模糊
- 一般是景深运动模糊二选一
高速摄影
高速摄影:每秒拍更多照片,有更高的帧数,然后按照正常帧数来放
因此,每张照片对应的快门时间非常短
快门时间短了,那么需要更大的光圈
延时摄影
延时摄影:对一些照片应用特别长的曝光时间,且采取更小的光圈
镜头
相机镜头复杂,无论是手机相机还是专业相机,镜头均由多个透镜组成。如下图是Iphone的摄像头

为简化描述,我们引入理想化的薄透镜模型,忽略其厚度。
假设薄透镜能将平行于透镜的光线聚焦到一点,此点即焦点,焦点到透镜中心的距离称作焦距。
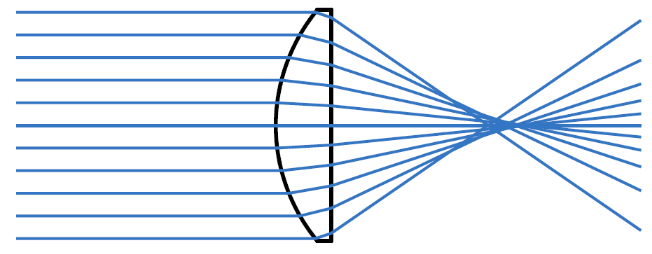
假设这个薄透镜的焦距是可变的(在现实中,是通过透镜组的方式来改变的)
有以下基本假设:
- 忽略透镜厚度
- 平行入射光线聚焦于焦点(焦距定义为焦点到透镜中心的距离)
- 遵循光路可逆原理
- 过中心光线方向不变
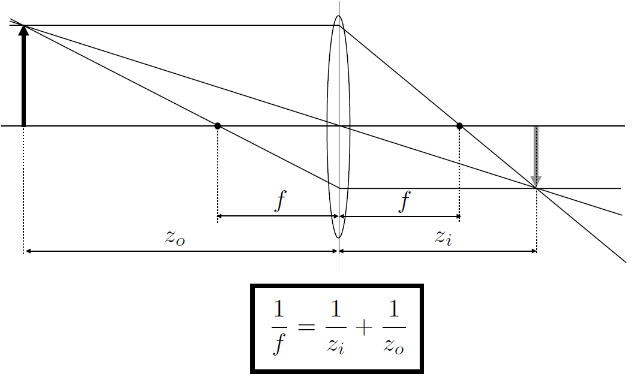
其中$f$为焦距,$z_i$为物距,$z_0$为像距。此公式揭示了物像位置的对应关系,可通过几何光学中的相似三角形原理推导得出。
弥散圆
弥散圆(Circle of Confusion, CoC)概念:当物点偏离焦平面时,其成像会形成扩散光斑
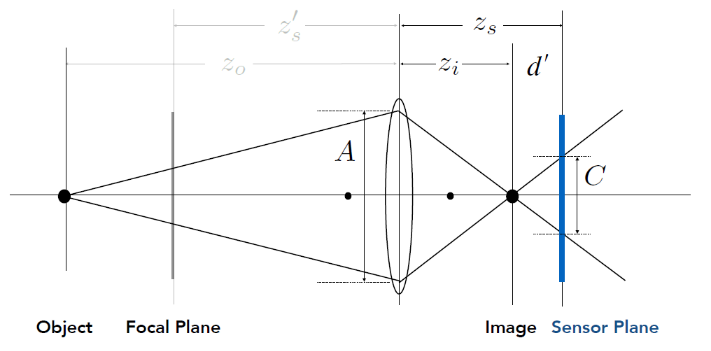
CoC直径计算公式如下: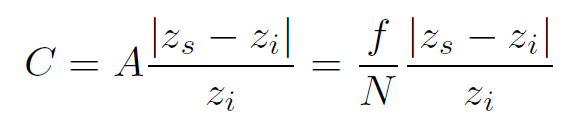
其中A为光圈孔径,$z_s$为感光元件位置,$f$为F数。
由此可知,CoC大小与光圈孔径正相关,与F数负相关。
这解释了为何大光圈(小F值)会产生显著景深效果。
薄透镜光线追踪
我们可以模拟薄透镜进行光线追踪
- 确定成像平面(传感器)的物理尺寸与空间位置
- 设定焦距 f 与光圈孔径值
根据高斯公式推导像距
对感光元件每个像素进行双采样操作:
- 透镜面采样:在透镜孔径范围内选择光线起点
- 场景追踪:向场景投射光线并计算辐射传输
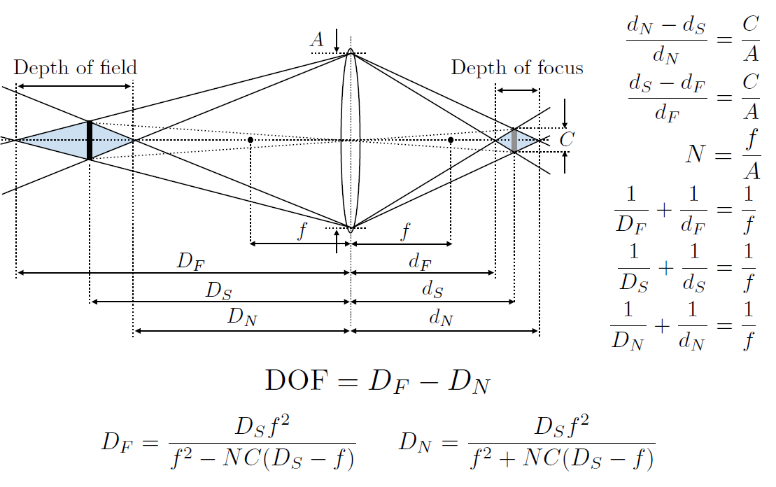
景深
景深(Depth of Field)指场景中成像清晰的轴向深度范围
焦平面(Focal Plane)上的物体无散焦模糊,偏离焦平面则产生弥散圆(CoC)
景深的影响因素:
- 光圈: 光圈越小(F数越大),景深范围越广
- 焦距: 长焦距导致浅景深,短焦距增加景深范围
- CoC阈值:定义可接受的模糊极限值(与感光元件分辨率相关)
光场
Light Field / Lumigraph
全光函数(The Plenoptic Function) 是用来描述在某一时刻,某一位置上能够看到的所有东西
全光函数的完整表示为$P(θ,ϕ,λ,t,V_x,V_y,V_z) $,其中θ和ϕ是极坐标表示,λ是波长,t是时刻,$V_x,V_y,V_z$是位置。
光场可以视作全光函数的一部分。
光场:在任何一个位置往任何一个方向的光的强度。
特别地,我们可以使用包围盒来囊括物体,这样的好处在于包围盒的形状简单,易于记录。
有了光场之后,当观察点在包围盒外时,我们可以知道任意一个位置,任意一个方向看向物体时的信息
有了光场之后,实际上我们并不需要知道物体本来是什么,我们只需要知道它的光场信息,就可以看到物体
光场照相机: 光场照相机的优点在于支持先照相,然后重新聚焦。